Work Package 1: Specification of Handling Qualities Criteria
Introduction
Within the RHILP program it was planned to investigate the Handling Qualities (HQ) criteria to be considered for designing a future European civil Tiltrotor (T/R). Since such an aircraft will be certified by civil aviation airworthiness agencies, a high standard of safety is required. Passenger and crew safety are strongly influenced by Handling Qualities. Other important reasons for an early assessment of HQ are the mission effectiveness and the development of the stability and control augmentation system. A T/R can be flown in basically three different modes. First, the rotor-borne mode with the nacelles tilted around 90 degrees (w. r. t. the longitudinal body axis), which is more or less like a helicopter flight and is mainly used to achieve vertical take-offs and landings. Second, the wing-borne mode with the nacelles tilted at its most forward position. This mode is similar to a conventional turboprop airplane flight and is used for cruising flight. The third mode is the conversion mode with the nacelles tilted between the rotor-borne mode and the wing-borne mode nacelle angle positions. Up to now no specific HQ requirements document exists for this unique aircraft configuration. A literature review on the available specifications and publications revealed a lack of criteria for the T/R. Not any specific criteria exists for the conversion mode so far. This fact underlines once more the importance of the HQ investigations.
Piloted simulations have been used for the validation and evaluation of the flight test manoeuvres and the assessment of T/R characteristics. 5 trials were performed at the simulation facility of the University of Liverpool (shown below). It hosts a six-degree-of-freedom motion base and six-channel visuals. A FLIGHTLAB XV-15 has been developed in the simulator environment and served the HQ assessment needs as a baseline configuration before the EUROTILT concept was finally applied. It was considered important to gain initial experience with an aircraft with known capabilities.
RHILP Approach to Handling Qualities
The RHILP project aims to assemble an integrated set of Handling Qualities (HQs) criteria primarily to define the design requirements for a Civil Tiltrotor (CTR) control system. The Handling Qualities approach adopted by the RHILP team builds on the latest developments in rotorcraft and fixed wing aircraft design methodologies. In particular, the HQs will be mission-oriented and flight test manoeuvres will be constructed from Mission Task Elements (MTEs) that feature essential aspects of pilot skill, task difficulty and workload, and exercise the aircraft's characteristics over the full range expected in operation. This advanced design philosophy was applied in the development of the ADS-33, the current aeronautical design standard for military Rotorcraft (R/C). The development of a CTR Handling Qualities manual and design guide is a very unique and challenging task. The challenge is to merge R/C and Fixed-Wing (F/W) criteria within one specification. In addition a third flight condition, the conversion mode, has to be considered and must be harmonized with the other two flight modes. Hence, a holistic approach is needed that leads all efforts through the project and helps to assure a high quality of the final outcome. The systems approach to CTR Handling Qualities was chosen according to the ADS-33, as shown below
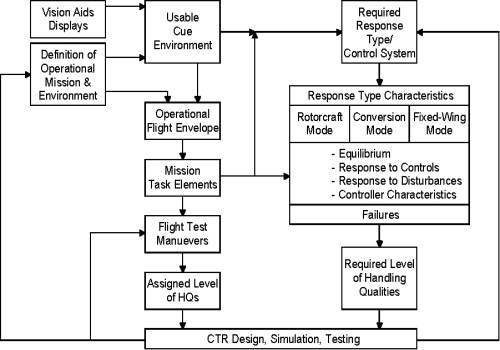
Based on this system approach, the following steps were taken within the RHILP project.
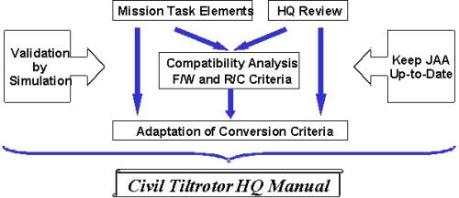
After the definition of the required missions, the mission task elements and test manoeuvres were defined which would later help to expose any Handling Qualities deficiencies in the aircraft characteristics. A review of the existing HQ specifications would deliver the basis for an analysis of the compatibility between applicable R/C and F/W criteria.
Mission Analysis
 Generally two kinds of mission are envisaged for a future Civil Tiltrotor: · Transport mission (passengers or freight) · Search and Rescue (SAR) mission Both missions include offshore tasks, e.g. supply and service flights for oil-rigs (see figure below) or maritime salvage. The missions were analyzed and divided in mission phases. From the mission phases a suit of Handling Qualities (HQs) critical mission task elements could be identified for all three flight modes.
Generally two kinds of mission are envisaged for a future Civil Tiltrotor: · Transport mission (passengers or freight) · Search and Rescue (SAR) mission Both missions include offshore tasks, e.g. supply and service flights for oil-rigs (see figure below) or maritime salvage. The missions were analyzed and divided in mission phases. From the mission phases a suit of Handling Qualities (HQs) critical mission task elements could be identified for all three flight modes.
A phase where all three Tiltrotor flight modes are relevant is the search or loiter phase of the SAR mission where the aircraft may need to operate at a low altitude, possibly close to the surrounding terrain. The aircraft is flown mainly with reference to outside visual cues. The flight mode will depend on the selected speed, which itself will depend on the characteristics of the search zone. If the search zone is wide, the Civil Tiltrotor will loiter in airplane mode to benefit from higher airspeeds, typically in the 140 - 160kts range. Wing flaps will be slightly extended as necessary to keep sufficient margin with respect to stall speed. If the search zone is small, or (and) if detection/identification of the rescue site requires lower speed flight, the Civil Tiltrotor will loiter in rotorcraft mode with the nacelles tilted forward at approximately 80°, typically around 70kts airspeed. Continuous flight in partially converted configuration (e.g. nacelles around 60° - 75°) should also be considered. This would allow the Civil Tiltrotor to loiter at intermediate airspeeds, typically around 100 - 120kts within the conversion corridor, thus extending its operational capabilities. Operations in this configuration, in partial wing-borne flight, will be particularly efficient at these intermediate speeds. As a Handling-Qualities-critical mission task element, the valley following was identified as shown below.

This Mission Task Element (MTE) evolved from the search task when the Civil Tiltrotor follows the surrounding landscape like a valley or river bed. The aircraft performs turns in either direction at low altitude and the pilot has to maintain the altitude with respect to the ground and a horizontal safety margin from the surrounding terrain. He must always be prepared for an abrupt change in the roll angle to avoid the terrain and obstacles when flying in the speed ranges indicated. The next stage of the mission analysis is to transform the MTEs into equivalent engineering test manoeuvres. The valley following MTE was transformed into a HQs test manoeuvre, called the roll-step manoeuvre shown sketched below.
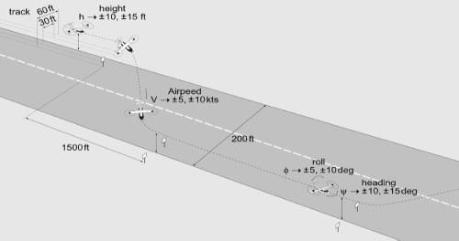
The roll-step is flown mainly with reference to outside world cues, and the primary axis of interest is the roll axis. In Handling Qualities terms, the task has two main elements - the initiation of the roll motion tends to be flown open-loop, whereas the lineup with the runway edge requires a closed-loop tracking control strategy. The response bandwidth and cross-couplings are critical aspects for the closed-loop control, while control power and attitude quickness are important to initiate roll movements (i.e. open-loop control phases). The need for the pilot to monitor aircraft states, particularly speed and height, will contribute to the workload.
Piloted Simulations
The FLIGHTLAB XV-15 and the EUROTILIT have been flown in a series of Handling Qualities Trials (HQTs) on the HELIFLIGHT facility of the University of Liverpool. To date 5 trials have been conducted, with 4 test pilots participating; · HQT_1 (April 2001); XV15, low speed manoeuvres in rotorcraft mode including effects of pilot aggressiveness, · HQT_2 (August 2001); XV15, mid speed manoeuvres in rotorcraft and conversion modes, including effects of pilot aggressiveness, · HQT_3 (December 2001); XV15, mid speed manoeuvres in conversion mode, including effects of varying attitude bandwidth and phase delay, · HQT_4 (April 2002); XV15, mid-high speed manoeuvres in fixed-wing mode, including effects of pilot aggressiveness. · HQT_5 (August 2002); EUROTILT, low-mid speed manoeuvres in rotorcraft mode The picture below shows the merry group of participants of the second Tiltrotor HQ simulation trial.

There were two major objectives of the trials; first to understand and define what constitute Level 2 HQs and, second, to establish the Level 2/3 boundaries and particularly any HQs cliff edges. During the simulation trials the pilots flew what we describe as compressed missions, comprising a contiguous sequence of the full set of Mission Task Elements (MTEs). The pilots were required to comment on the level of realism, the piloting techniques, mission constraints, performance requirements and general suitability/criticality of the MTEs as the basis for the HQs developments. The pilots also evaluated the Handling Qualities test Manoeuvres as clinical representations of the MTEs. Each Handling Qualities test Manoeuvre (HQM) was flown to develop/verify the performance standards, levels of aggressiveness and the adequacy of simulation cueing arrangements. In this way the HQMs were defined in a manner that would exercise the full range of Handling Qualities of interest.
Civil Tiltrotor Roll Axis Handling Qualities
The investigations of the roll attitude bandwidth and phase delay have mostly concentrated on the conversion flight mode of the Civil Tiltrotor (CTR). It was intended to improve the understanding of the relevance of aircraft bandwidth and phase delay as Handling Qualities (HQs) parameters to flight in this unique mode and also develop answers to the questions that arose during the compatibility analysis. How can the small amplitude/high frequency response be classified? Will the aircraft respond more like a rotorcraft or more like a fixed-wing aircraft, or perhaps exhibit new characteristics that need a new criterion? The RHILP project aims to define the required standards for the Level 2 area in particular the location of the Level 2/3 boundary. Therefore a flight configuration was chosen which is clearly identified as a Level 2 tending towards the Level 3 boundary. The requirement was fulfilled by the low-aggression (100kts case) conversion configuration with a nacelle angle of 60°. This configuration is designated the baseline configuration for the bandwidth-phase delay analysis. The 60° case is expected to be a typical loiter flight condition of a future European CTR, and is therefore of special interest.
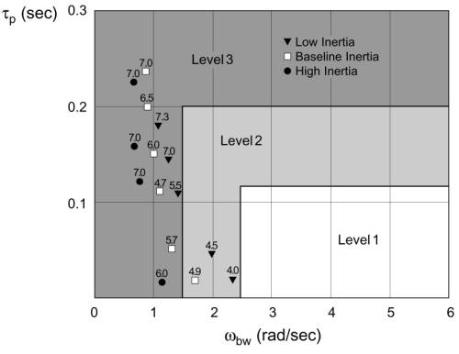
Starting from this baseline configuration, two parameters were varied to "simulate" changes in bandwidth and phase delay. First, the roll inertia was increased and decreased with respect to the baseline configuration in order to expose any extreme roll characteristics. Second a pure time delay was introduced, affecting both the bandwidth and phase delay, to open up a wider area on the bandwidth/phase delay chart. The baseline configuration was defined as having zero pure time delay as such. The time delay adjusting screw was then opened up to about 300msec in steps of roughly 25msec. Using both parameters permits the engineer to "walk around" on the bandwidth/phase delay plane.
About 15 different bandwidth/phase-delay configurations were evaluated by the 3 pilots in the simulator, amounting to almost 50 Handling Quality ratings gathered in the conversion mode. The figure below compares the FLIGHTLAB XV-15 data (averaged HQRs) with the ADS-33E bandwidth criteria boundaries for tracking tasks. Three levels of roll inertia with varying time delays are shown. The data suggests that for the roll axis in the conversion mode with a nacelle angle of 60° and a speed of a 100kts, the aircraft HQs resemble a helicopter when flying a roll step manoeuvre. Note, that the bandwidth/phase delay points in assume a simulator time delay of 35msec. Small errors in this assumption however are unlikely to change the general conclusions.