HELI-ACT Member - Mark Voskuijl
I received an M.Sc. degree in Aerospace Engineering from Delft University of Technology in 2003. This degree involved a 6-month work placement at Boeing Helicopters in Mesa, Arizona and a 9-month work placement at the Helicopter Department of the Dutch National Aerospace Laboratory (NLR) in Amsterdam. I am currently working towards a Ph.D. degree with Dr. Daniel J. Walker at the University of Liverpool within the HELI-ACT project.
My main contributions to the HELI-ACT project are summarised below.
Aircraft modelling
The Bell 412HP Advanced Systems Research Aircraft is subject to a torque oscillation issue. The engine torque exhibits an underdamped dynamic response, which can be described as a characteristic second order response. This has a profound impact on handling qualities of the heave axis and on the other aircraft axes as well via cross-coupling effects. As an example, the pilot has to monitor the mast torque in many flight conditions in order to prevent torque excursions and this increases workload significantly. It was therefore decided to expand the high fidelity simulation model of the Bell 412 developed by Binoy Manimala with an accurate engine model. A linear engine model was obtained by the NRC through system identification. The Bell 412 simulation model was upgraded by replacing the ideal engine model with a simple engine model, consisting of several coupled second order systems. This simple engine model was subsequently tuned to give the same response as the linear engine model provided by the NRC. The resulting aircraft model was validated against flight test data, and good agreement was found between mast torque predictions from simulation and mast torque measured in flight.
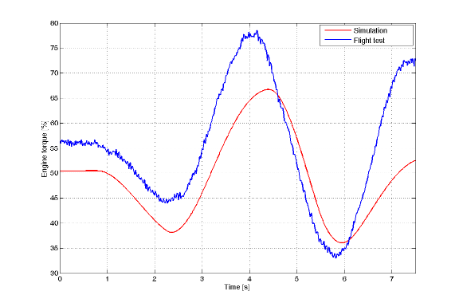
Figure 1: Engine torque comparison between flight test and simulation
Structural Load Alleviation
A case study was performed on the pitch link loads of the UH-60 Black Hawk during high-speed longitudinal manoeuvres. The pitch link loads can reach very high to unacceptable levels when performing pull-up manoeuvres at high speed. It was shown that H-infinity control could be used to design a longitudinal ACAH control law that takes into account structural load objectives (minimization of the pitch link load). A structural load severity scale was designed in order to be able to analyse structural load alleviation control laws.
Handling Qualities improvement
Classical nonlinear control theory (one nonlinear element in a feedback loop) was used to design ACAH control laws for the Bell 412 ASRA. The nonlinear control system architecture allows the speed of the response and thus the attitude quickness of the aircraft to be specified by the designer. The stability of these control laws was a prime concern and nonlinear stability techniques (describing function analysis and the Popov criterion) had to be used to assess the stability of the control laws. Successful flight tests were performed in 2006, proving the concept. Besides fixed speed of response, these control laws also had a high bandwidth. For example, a pitch bandwidth of 3.5 rad/s was achieved in flight, which correlated very closely to the predicted bandwidth of 3.4 rad/s from simulation.
Envelope Protection
As explained in the paragraph about aircraft modelling, the Bell 412 ASRA is subject to a torque oscillation issue. A heave axis flight control law was therefore designed using a combination of nonlinear control and H-infinity control. The response type of this control law is either torque command or height rate command, to be selected by the pilot. Torque envelope protection is provided by the system when the height rate command response type is selected. This system was subjected to ground based piloted simulation. Results indicated a marked improvement in handling qualities for heave axis manoeuvres.
Automatic Shipboard Landing
The landing of a helicopter on a ship is a very difficult task due to a couple of reasons. The ship motion causes the landing spot to move up and down, roll and pitch, all at the same time. An invisible ship air-wake is also present due to the interaction of free stream wind and the superstructure of the ship. This air-wake can unfortunately be highly turbulent and unpredictable from the pilot's perspective. Things can even get worse in poor weather conditions. Altogether; the landing of a helicopter is arguably one of the most dangerous of all helicopter flight operations. An automatic shipboard landing system was therefore designed. This system consists of a set of control loops that can be added to an existing ACAH/RC control system. A novelty of the system is found in the height control algorithms. Tau-based control is used in that axis in order to make automatic landings seem natural to the pilot. The automatic landings are performed with ground based simulations at the University of Liverpool on a model of a Royal Navy Type 23 Frigate.

Figure 1: View of a type 23 frigate in the simulator at the University of Liverpool