|
K2 is
a motor-driven star tracker that I designed and built
to allow photographs of the night sky to be taken
without the photographs showing star trails due to the
rotation of the Earth. I wanted to be able to take the
star tracker on holiday to Kenya (on the equator) and
photograph the skies there that are unaffected by
light pollution.
|
||
So the star tracker had to be:
|
In practice, this means:
|
|
ConstructionAs this was my second star tracker (I built my first one when I was a student at college) I called it K2. I decided to construct K2 from lengths of L-section and U-section aluminium bolted together as this is very strong and very light. The sections make two 'T' shapes, the static base T and the moving top T. The pivot is provided by two brass hinges that connect the two T's together, positioned at the ends of the top bars of the T's. When operating the two T's are pushed apart by a bolt driven at 1 rpm by a small motor and gearbox. The design is optimised for low latitudes (within 20° of the equator), but will also work in the UK (latitude 52°) provided that the camera and lens are not so heavy that they put the whole system out of balance. |
||
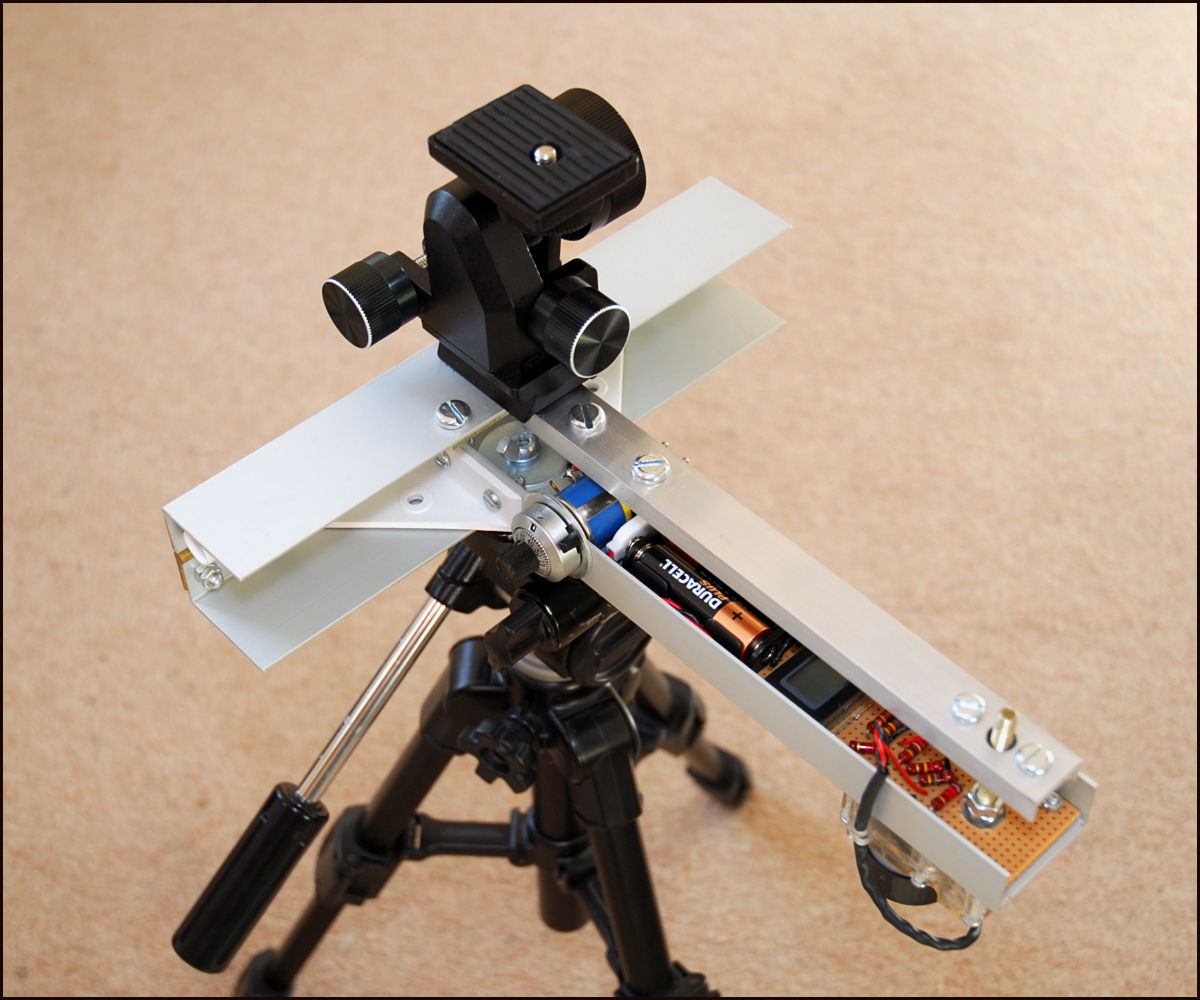 K2 in operating configuration |
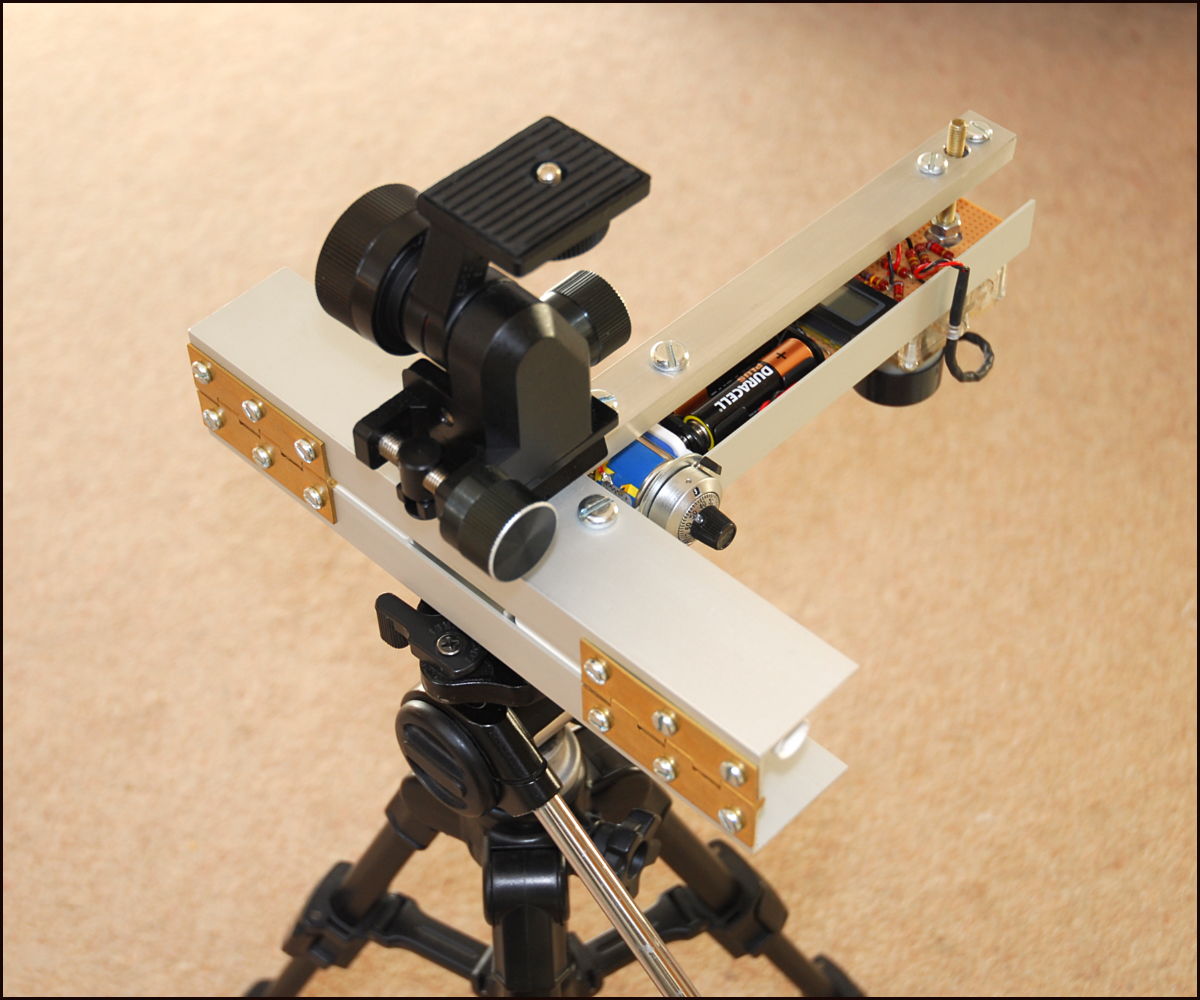
 K2 opened to show components |
 Hinges give a smooth movement |
|
The M6
bolt has a 1 mm pitch and is positioned 230 mm from
the hinge axis. A nut sits on the bolt and is driven
upwards as the bolt rotates (the nut cannot rotate as
it is constrained within the U-section arm that forms
the length of the top T). Driving the bolt at 1 rpm
forces the top T to rotate at approximately 1/230 of a
radian per minute, or one revolution per day, to
counteract the rotation of the Earth. The design is
much more accurate than a conventional tangent drive
and much simpler than a double-arm drive. The reason
for the high accuracy is explained, with technobabble,
here.
|
||
|
 Close-up of components |
|
| In practise, the
tracking accuracy of K2 is determined by the degree of
alignment between the hinge axis and the Earth's axis. A
polar scope, used in some commercial star trackers, is
useless if Polaris is on the horizon. An alternative
method of alignment is to use an inclinometer and a
compass to set the altitude and azimuth, respectively. A
digital inclinometer is accurate to 0.1°, but even a
digital compass is only accurate to about 1° and you
have to know the offset between magnetic North and true
North for your location. Inaccurate polar alignment is
the biggest factor that affects the overall tracking
accuracy of K2 and I am thinking about ways to improve
it. |
||
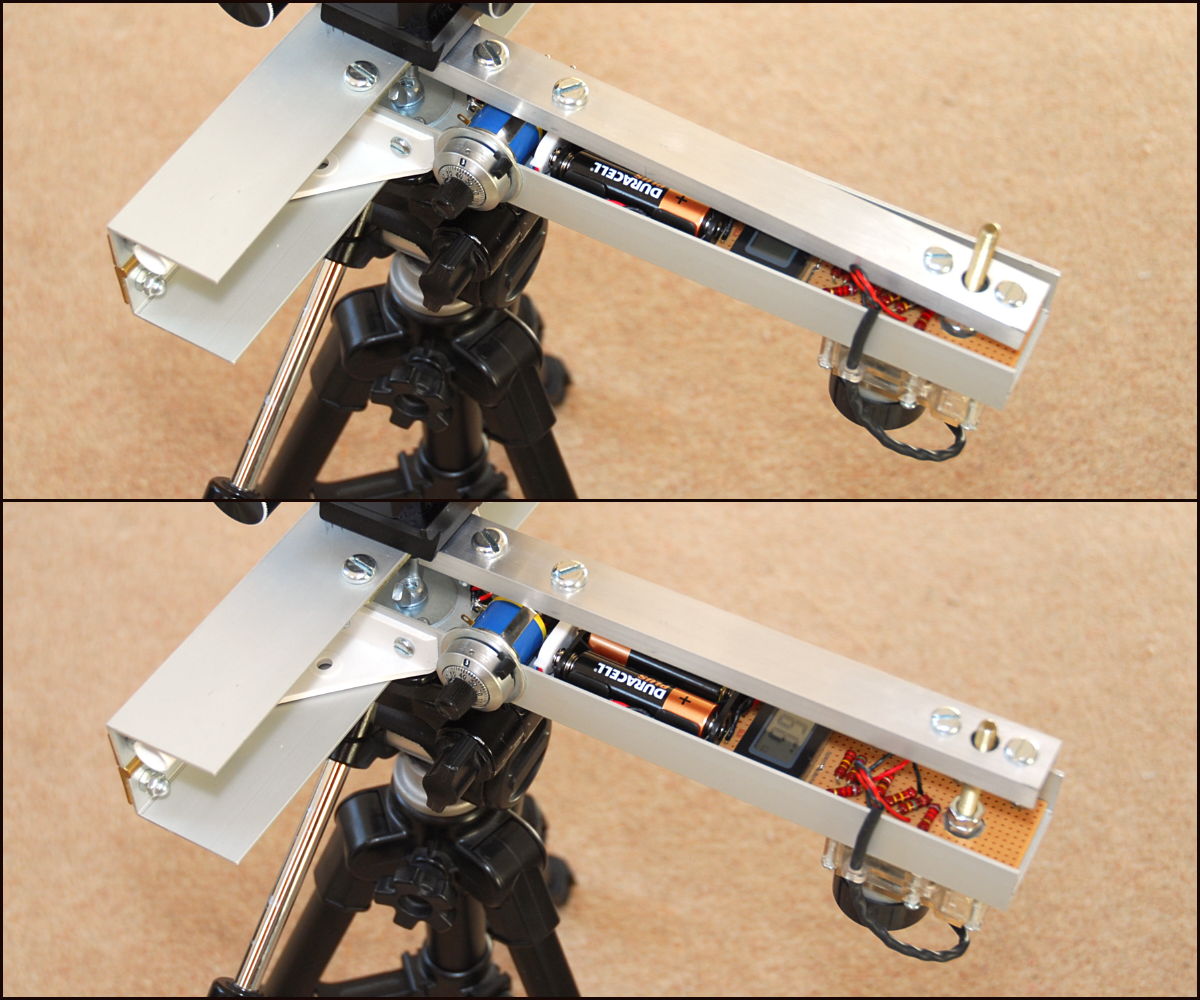 Movement after 15 minutes driving |
The
image on the left shows K2 at the start (top) and end
(bottom) of a 15-minute run. The motor has turned the
bolt 15 revolutions, pushing the nut 15 mm upwards
along the bolt and rotating the top T by about 4° from
its starting position. At this point the top T can be
lifted off the nut and the nut spun back down the bolt
by hand, ready to start another 15-minute run.
Note that the direction of the bolt moves slightly as the top T moves relative to the base T. The nut moving on the bolt is cylindrical (see close-up image below right) and so the contact point on the underside of the top T 'rolls' over the cylinder. Small strips of teflon on the underside of the top T ensure that the contact between the nut and top T is smooth. |
|
| The layout of the
components inside the base T is shown in the close-up image above
right. The resistors are arranged in two sets. One set
is a potential divider to drop the 3 V supplied by the
two AA batteries down to the 2.3 V that is needed to
drive the motor at 1 rpm (3 V drives it at 1.3 rpm). The
second set is used to drop either (i) the voltage
supplied by the batteries or (ii) the voltage across the
motor down to the appropriate value for display on the
LCD voltmeter. As the voltmeter is set to read a maximum
of 1.999 V (for maximum resolution) the battery voltage
is divided by 2 and so displays 1.5 V when the batteries
are fresh. The voltage across the motor is divided by
2.3 so that the voltmeter reads 1 V when the motor has
2.3 V across it (and is rotating at 1 rpm). Thus, the
voltmeter effectively reads rpm. |
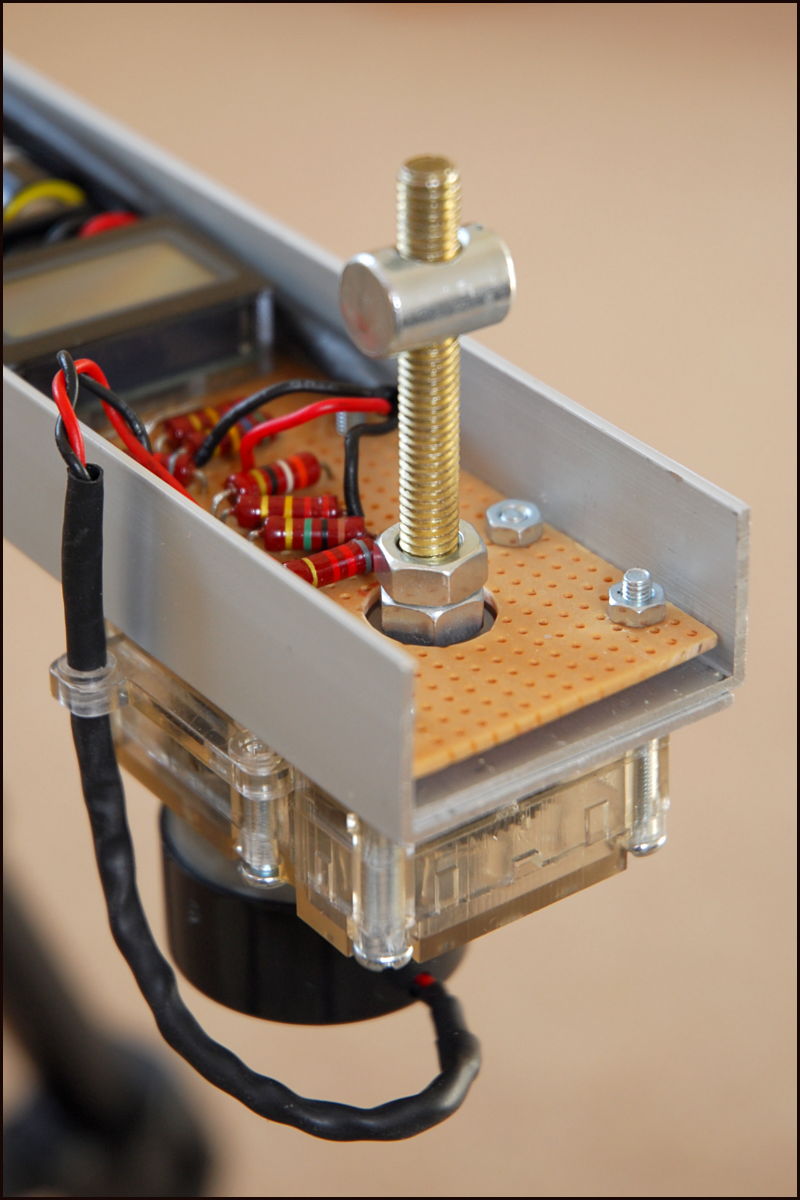 Cylindrical
nut on drive bolt
|
|
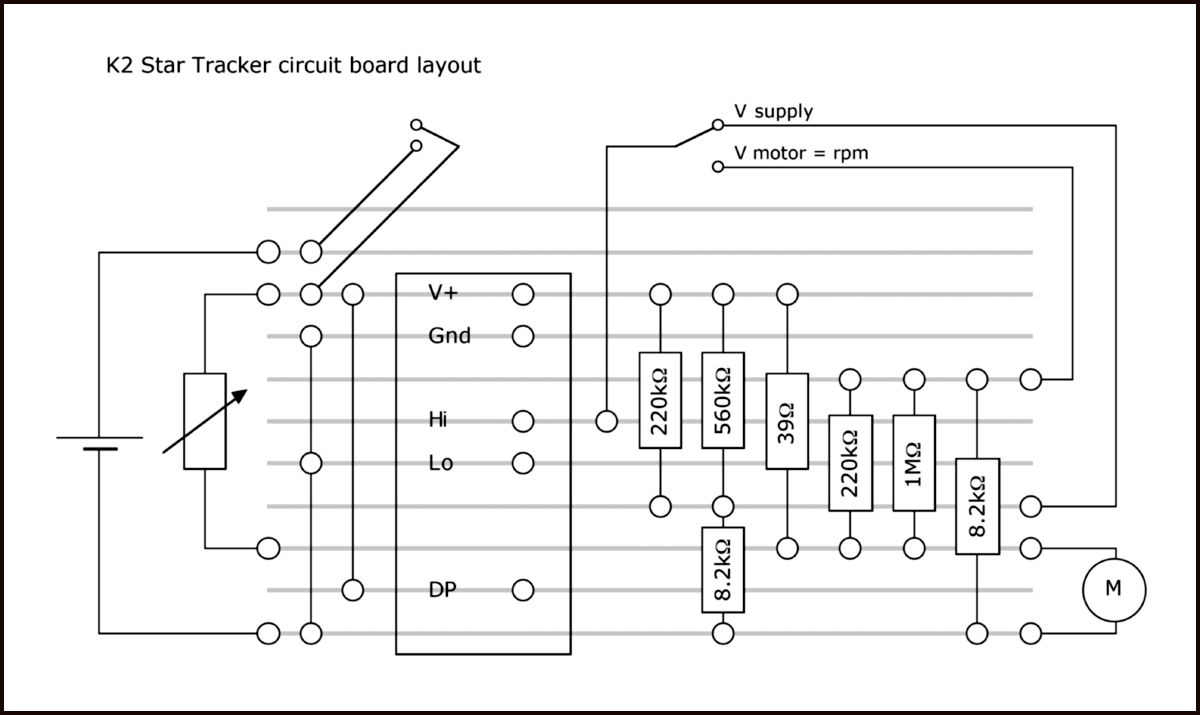
Layout of circuit components
|
The
layout of the components inside the base T is shown in
the circuit diagram on the left. The potentiometer is in
parallel with one of the resistors in the potential
divider that drops the battery supply voltage down
from 3 V to 2.3 V. This allows the voltage across the
motor, and hence the speed of the drive, to be
adjusted to compensate for the slow drop in voltage of
the batteries as they gradually run down. When
starting a photography session, the potentiometer is
adjusted until the voltmeter, set to read the voltage
across the motor (divided by 2.3), reads 1.000 rpm.
Over a 15-minute period, the battery voltage will
hardly change at all, but it can be checked at the end
of each 15-minute session when the top T is lifted to
spin the nut back to its starting position. The
voltage supplied by a battery changes with
temperature, so it's worth keeping an eye on it over
the course of a night as the temperature drops.
As K2 was built with hand tools, I could not guarantee that the dimensions were exactly as per theoretical design. This is not a problem. For instance, if when constructed it turns out that the distance from the drive bolt to the hinge axis is 231 mm, rather than 230 mm, then the motor can be set to drive at 231/230 = 1.004 rpm. |
|

