|
The accuracy
of the K2 star tracker is a function of the
design of the arms and the drive bolt that moves one relative to the
other. K2 is an 'isosceles' drive as the arms and drive bolt form an
isosceles triangle, with each arm having the same (fixed) length. This
is different to a tangent drive, in which the point at which the drive
rod acts moves/slides along the moving arm.
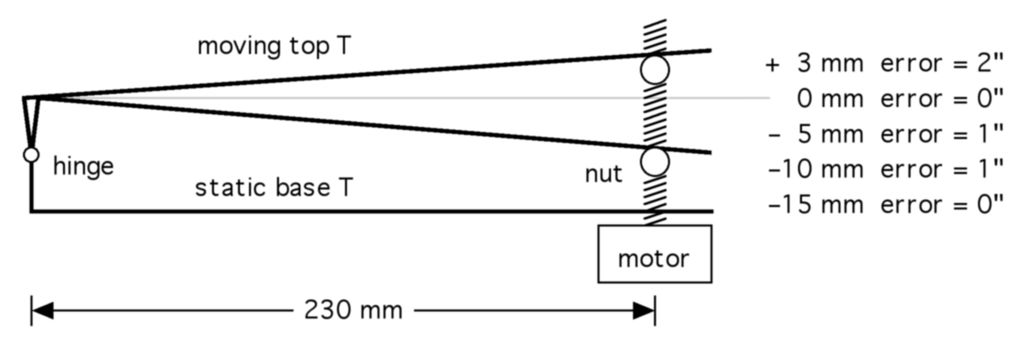
The tracking error is the difference between where the tracker is pointing and where a star is. A single-arm tangent drive which starts the arm rotating at the correct (sidereal) rate of one revolution in 23h 56m will show a tracking error after a few minutes. If the angle through which the arm has turned is theta, then theta is always less than tan(theta) and so if the motor drives the arm such that tan(theta) increases at a constant rate - as a tangent drive does - then the rate at which the arm is rotating will decrease with time. This slow down can be compensated for to a limited extent by running the drive slightly fast so that the point at which the effect of the slow down becomes serious is delayed for a few minutes. Some designs of star tracker use a double-arm drive so that the tangent error can be compensated for more accurately, but this results in a more complex design. With K2, I took a different approach. The planes in which the drive bolt intercepts the motor (on the static base T) and the drive nut (under the moving top T) do not contain the hinge axis. The hinge axis is offset from these planes by 20 mm, as illustrated in this side view of the construction. Note that for the first 15 minutes of operation the drive is pushing the two arms towards being parallel, not away from being parallel. |
||
 |
||
|
In the diagram
above the angles of the moving top T relative to the static base T have
been exagggerated for clarity. The distances indicate the position of
the top of the cylindrical nut relative to the height that would make
the top T parallel to the base T (grey line), together with the
total tracking errors at those positions. The nominal 20-minute working
range
of K2 corresponds to the nut covering the range from -15 mm
to +5 mm.
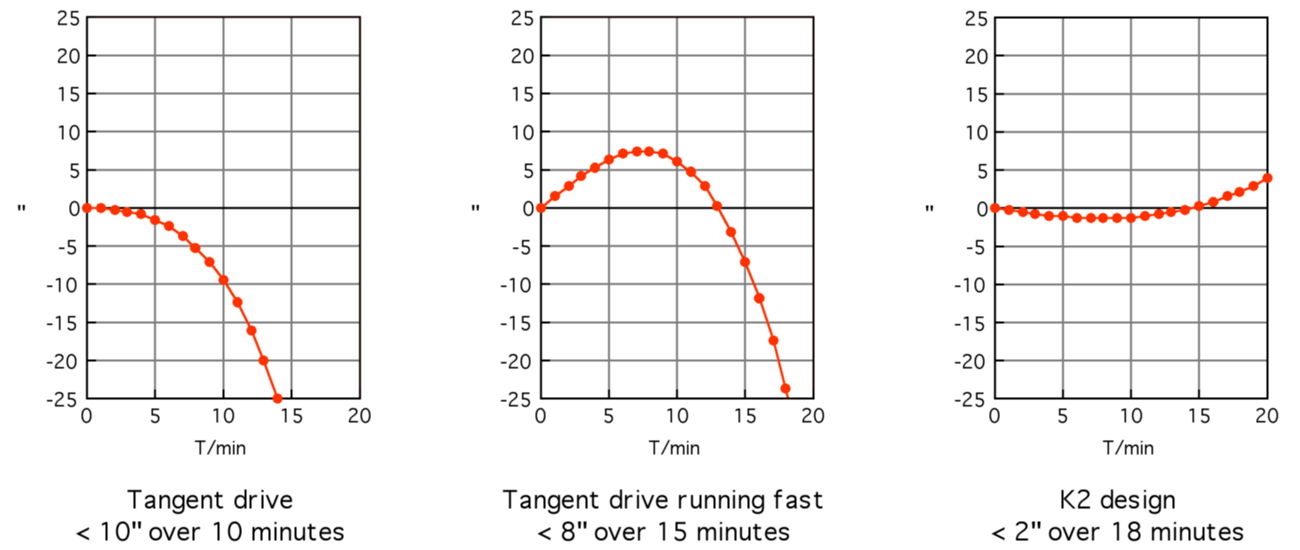
Plotting the tracking error (in arcsec) as a function of time (in minutes) shows the difference between (i) a tangent drive, (ii) a tangent drive with the motor running fast by 0.15%, and (iii) the K2 design. |
||
| |
 |
|
|
For a tangent
drive (left) the tracking error starts small, but just grows with time.
Running the drive fast by 0.15% (middle) produces an initial tracking
error of a few arcsec in the first few minutes, but then the tangent
error kicks in and the tracking error goes through zero and then grows
rapidly. With the K2 design (right) the tracking error can be kept within the range of +/- 2 arcsec over 18 minutes.
|
||